 |
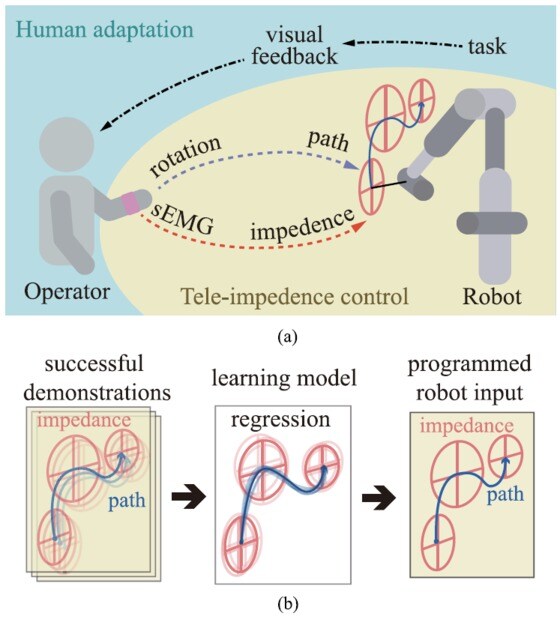
| 사람의 시연을 통한 로봇의 임피던스 프로그래밍 방법 모식도 © 뉴스1 |
직접 프로그래밍을 하지 않아도 사람의 근육신호를 따라 공을 트래핑하는 소프트 '로봇'을 국내 연구진이 개발했다. 이 기술은 사람처럼 달리거나 장애물을 뛰어넘는 로봇개발에 활용될 수 있을 전망이다.
김기훈 한국과학기술연구원(KIST) 지능로봇연구단 박사팀은 사람의 '표면 근전도 신호'를 이용해 소프트 로봇을 학습시키는 기술을 개발하고, 이 기술로 로봇이 축구선수처럼 떨어지는 공을 트래핑하도록 학습시키는데 성공했다고 19일 밝혔다.단단한 로봇과는 다르게 유연한 소프트 로봇은 사람의 근육이나 관절처럼 탄력이 있다. 따라서 사람처럼 달리거나 뛰어서 장애물을 넘는 것이 가능하다. 그러나 인간의 활동을 완벽하게 수학적으로 정의하는 것이 불가능해 수학적 프로그래밍을 통해 로봇에게 활동을 입력하는 데는 한계가 있었다.
이에 연구진은 인간의 생체신호에 집중했다. 특히 사람이 운동하면서 근육이 수축할 때 발생하는 내부의 전기신호를 피부 표면에서 측정한 생체 전기신호 '표면 근전도 신호'를 이용해 로봇에게 동작을 가르쳐 주고자 했다. 연구진은 축구 선수처럼 빠르게 떨어지는 공을 단단한 부분 위에 공이 크게 튀지 않도록 트래핑하는 기술을 로봇에게 4~5번 정도 학습시켰다.
이에 로봇은 사람의 팔에 부착된 표면 근전도 센서를 통해 모아진 데이터로 로봇의 위치와 유연성 두 가지를 동시에 제어했다. 이에 빠르게 떨어지는 공을 대상으로 로봇은 사람 없이도 떨어지는 공을 능숙하게 트래핑하는데 성공했다.김기훈 박사는 "로봇에게 사람의 능숙한 기술을 학습시키는 방법으로 앞으로 로봇과 사람이 상호작용하는데 중요한 계기가 될 것"이라고 말했다.
이번 연구결과는 제어분야 국제저널 '국제전기전자기술자협회 산업정보학학회지'(IEEE Transactions on Industrial Informatics)의 최신호에 실렸다.
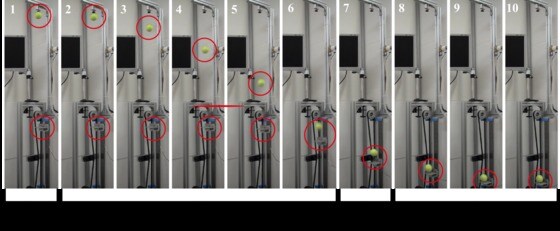 |
| 로봇이 공을 트래핑하는 모습 © 뉴스1 |
somangchoi@











![신세경, 물 머금은 듯한 청초 미모...세련미까지 '감탄' [N컷]](https://image.news1.kr/system/photos/2024/5/9/6640179/no_water.jpg/dims/resize/276/crop/276x184/thumbnail/138x92!/optimize)




